
Mobile-Projected Trajectory Algorithm With Velocity-Change
Detection for Predicting Residual Link Lifetime in MANET
ABSTRACT:
We study the estimation of
residual link lifetime (RLL) in mobile ad hoc networks (MANETs) using the
distances between the link’s nodes. We first prove that to compute uniquely the
RLL, at least four distance measurements are required. We also demonstrate that
random measurement errors are the dominant factor in prediction inaccuracy and
that systematic errors are negligible. We then propose a mobile-projected
trajectory (MPT) algorithm, which estimates the relative trajectory between
two nodes from periodical measurements of the distances between them. Using the
relative trajectory, the algorithm estimates the RLL of the link between the
two nodes. For comparison purposes, we derive a theoretical upper bound on the
achievable prediction inaccuracy by any distance-based RLL prediction algorithm
with unknown but finitely bounded measurement-error distribution. To account
for velocity changes, the MPT is enhanced with a velocity-change detection
(VCD) test. Performance evaluation demonstrates robustness in RLL prediction
for piecewise-linear trajectory and multiple velocity changes during the link
lifetime.
EXISTING SYSTEM:
•
In existing, they proposed a prediction
criterion, whereby a link with an older age is assumed to have a longer
expected RLL.
•
The behavior of RLL as a function of
link age under different mobility models through simulations and proposed
several path-selection algorithms for MANETs.
•
Also they have proposed a routing
protocol that reduced the node energy consumption to increase the network
lifetime and developed a route-selection algorithm by computing link lifetimes
to choose the least dynamic route; the link lifetimes were computed by the
energy drain rate and estimated relative motion between the nodes.
•
In contrast with previous works, our
algorithm does not necessitate GPS support, is designed for a network with
mobile nodes all with basic functionality, requires no beacon nodes to provide
location information, and treats the case where the velocity does not remain
constant.
DISADVANTAGES
OF EXISTING SYSTEM:
•
Reduce the network lifetime
•
Increase delay
PROPOSED SYSTEM:
•
In this project, we propose a mobile-projected
trajectory (MPT) algorithm that estimates the relative trajectory
between two nodes of a link from periodically measured distances between the
nodes.
•
Using the relative trajectory, the MPT
estimates the link’s RLL.
•
To account for velocity changes during
the link’s lifetime, the MPT is augmented with a velocity-change detection
(VCD) test.
•
The new algorithm, which is referred to
as MPT-VCD, significantly improves the RLL prediction accuracy.
•
As we shall see, neither MPT nor MPT-VCD
requires any information about node velocity or its position.
ADVANTAGES OF PROPOSED SYSTEM:
•
Efficient path selection
•
Increase network lifetime
•
Reduce delay
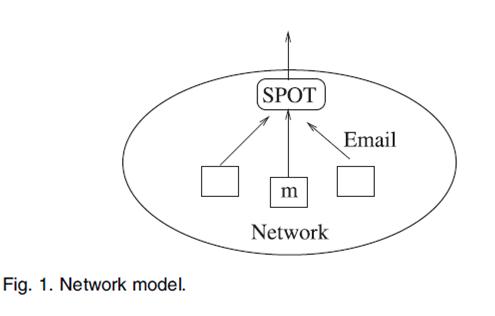
SYSTEM ARCHITECTURE:
SYSTEM FLOW:
HARDWARE REQUIREMENTS:
Ø
System : Pentium IV 2.4 GHz.
Ø
Hard Disk :
40 GB.
Ø
Floppy Drive : 1.44
Mb.
Ø
Monitor : 15
VGA Colour.
Ø
Mouse :
Logitech.
Ø Ram : 512 Mb.
SOFTWARE
REQUIREMENTS:
Ø Operating system : Windows
XP/7/LINUX.
Ø Implementation : NS2
Ø NS2 Version : NS2.2.28
Ø Front
End : OTCL (Object Oriented
Tool Command Language)
Ø Tool : Cygwin (To simulate in Windows OS)
REFERENCE:
Edward Y. Hua, Member, IEEE, and Zygmunt J.
Haas, Fellow, IEEE, “Mobile-Projected
Trajectory Algorithm With Velocity-Change Detection for Predicting Residual
Link Lifetime in MANET”, IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64,
NO. 3, MARCH 2015.