
Continuous Neighbor Discovery in Asynchronous
Sensor Networks
Abstract:
In most sensor networks the nodes are static. Nevertheless, node connectivity is subject to changes because of disruptions in wireless communication, transmission power changes, or loss of synchronization between neighboring nodes. Hence, even after a sensor is aware of its immediate neighbors, it must continuously maintain its view, a process we call continuous neighbor discovery. In this work we distinguish between neighbor discovery during sensor network initialization and continuous neighbor discovery. We focus on the latter and view it as a joint task of all the nodes in every connected segment. Each sensor employs a simple protocol in a coordinate effort to reduce power consumption without increasing the time required to detect hidden sensors.
Existing System:
Initial neighbor discovery is usually performed when the sensor has no clue about the structure of its immediate surroundings. In such a case, the sensor cannot communicate with the gateway and is therefore very limited in performing its tasks.
Disadvantages of Existing System:
1. In networks with continuously heavy traffic.
2. Long-term process.
3. Greater expense of energy than required in our scheme.
Proposed System:
We distinguish between neighbor discovery during sensor network initialization and continuous neighbor discovery. We focus on the latter and view it as a joint task of all the nodes in every connected segment. Each sensor employs a simple protocol in a coordinate effort to reduce power consumption without increasing the time required to detect hidden sensors.
Advantages of Proposed System:
1. Detect their immediate neighbors.
2. Message does not collide with another.
3. Every node discovers its hidden neighbors independently.
Architecture:

Algorithm:
AN EFFICIENT CONTINUOUS NEIGHBOR DISCOVERY ALGORITHM:
In this section we present an algorithm for assigning HELLO message frequency to the nodes of the same segment. This algorithm is based on detecting all hidden links inside a segment. Namely, if a hidden node is discovered by one of its segment neighbors, it is discovered by all its other segment neighbors after a very short time. Hence, the discovery of a new neighbor is viewed as a joint effort of the whole segment. One of the three methods presented in Section is used to estimate the number of nodes participating in this effort.
Suppose that node u is in initial neighbor discovery state, where it wakes up every TI seconds for a period of time equal to H, and broadcasts HELLO messages. Suppose that the nodes of segment S should discover u within a time period T with probability P.
Modules:
1. Client – Server
2. Detecting all hidden links Inside a segment
3. Detecting all hidden links Outside a segment
4. Neighbor Discovery Model
Modules Description:
Client – Server:
Client – Server computing is distributed access. Server accepts requests for data from client and returns the result to the client. By separating data from the computation processing, the compute server’s processing capabilities can be optimized. Often clients and servers communicate over a computer network on separate hardware, but both client and server may reside in the same system.
Hidden link participate Inside a segment:
This scheme is invoked when a new node is discovered by one of the segment nodes. The discovering node issues a special SYNC message to all segment members, asking them to wake up and periodically broadcast a bunch of HELLO messages. This SYNC message is distributed over the already known wireless links of the segment. Thus, it is guaranteed to be received by every segment node. By having all the nodes wake up .almost at the same time. for a short period, we can ensure that every wireless link between the segment's members will be detected.
Hidden link participate Outside a segment:
A random wake-up approach is used to minimize the possibility of repeating collisions between the HELLO messages of nodes in the same segment. Theoretically, another scheme may be used, where segment nodes coordinate their wake-up periods to prevent collisions and speed up the discovery of hidden nodes. Since the time period during which every node wakes up is very short, and the HELLO transmission time is even shorter, the probability that two neighboring nodes will be active at the same time.
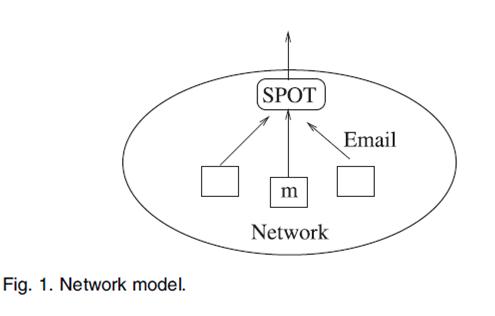
Neighbor Discovery Model:
Neighbor Discovery is studied for general ad-hoc wireless networks. A node decides randomly when to initiate the transmission of a HELLO message. If its message does not collide with another HELLO, the node is considered to be discovered. The goal is to determine the HELLO transmission frequency, and the duration of the neighbor discovery process.
HARDWARE & SOFTWARE REQUIREMENTS:
HARDWARE REQUIREMENTS:
· System : Pentium IV 2.4 GHz.
· Hard Disk : 40 GB.
· Floppy Drive : 1.44 Mb.
· Monitor : 15 VGA Color.
· Mouse : Logitech.
· Ram : 512 MB.
SOFTWARE REQUIREMENTS:
· Operating system : Windows XP Professional.
· Coding Language : C#.NET
REFERENCE:
Reuven Cohen and Boris Kapchits, “Continuous Neighbor Discovery in Asynchronous Sensor Networks”, IEEE/ACM Transactions on Networking, Vol. 19, No.1, February 2011.


{kind=link}